Article of the Month - July 2019
|
A Benchmarking Measurement Campaign in
GNSS-denied/Challenged Indoor/Outdoor and Transitional Environments
Allison KEALY, Australia; Guenther
RETSCHER, Austria; Jelena GABELA, Australia; Yan LI, Australia; Salil
GOEL, India; Charles K. TOTH, U.S.A.; Andrea MASIERO, Italy; Wioleta
BŁASZCZAK-BĄK, Poland; Vassilis GIKAS, Greece; Harris PERAKIS, Greece;
Zoltan KOPPANYI, U.S.A., Dorota GREJNER-BRZEZINSKA, U.S.A.
This article in .pdf-format
(19 pages)
This article is a peer reviewed paper, presented at
the FIG Working Week 2019 in Hanoi, Vietnam. The paper received the
navXperience award given to the best peer review paper within the area
of positioning and measurement (FIG Commission 5).

Key words: cooperative positioning, indoor
positioning, indoor-outdoor smooth transition, sensor integration,
vehicle and pedestrian navigation
SUMMARY
This paper reports about a sequence of extensive experiments,
conducted in GNSS-denied/challenged, indoor/outdoor and transitional
environments at The Ohio State University as part of the joint FIG
Working Group 5.5 and IAG Working Group 4.1.1 on Multi-sensor Systems.
The overall aim of the campaign is to assess the feasibility of
achieving GNSS-like performance for ubiquitous positioning in terms of
autonomous, global, preferably infrastructure-free positioning of
portable platforms at affordable cost efficiency. Therefore, cooperative
positioning (CP) of vehicles and pedestrians is the major focus where
several platforms navigate jointly together. The GPSVan of The Ohio
State University was used as the main reference vehicle and for
pedestrians, a specially designed helmet was developed. The
employed/tested positioning techniques are based on using sensor data
from GNSS, Ultra-wide Band (UWB), Wireless Fidelity (Wi-Fi), vison-based
positioning with cameras and Light Detection and Ranging (LiDAR) as well
as inertial sensors. The experimental schemes and initial results are
introduced in this paper. The results from the experimental campaign
demonstrate performance improvements due applying CP techniques.
1. INTRODUCTION
Localization in indoor and obscured GNSS (Global Navigation Satellite
Systems) environments remains one of the challenging research problems.
Cooperative positioning (CP) or localization (CL) has been demonstrated
to be extremely useful for positioning and navigation of mobile
platforms within a neighborhood. CP, however, is still based mainly on
GNSS with sensor augmentation using inertial sensors. In challenging
GNSS-denied or combined indoor/outdoor environments, the use of
alternative positioning technologies is required (see e.g. Alam and
Dempster, 2013; Kealy et al., 2015). This paper investigates the use of
Ultra-wide Band (UWB), Wireless Fidelity (Wi-Fi), vison-based
positioning with cameras and Light Detection and Ranging (LiDAR)
technologies as alternative and complementary techniques for
augmentation. A benchmarking measurement campaign was carried out at The
Ohio State University in October 2017. In the experiments, vehicles and
pedestrians navigated jointly together to achieve CP ubiquitous
positioning (see e.g. Kealy et al., 2011; Retscher and Kealy, 2006),
including seamless transitions between indoor/outdoor environments. The
experimental schemes and characteristics are summarized, and initial
results are presented in this paper.
2. SEAMLESS INDOOR-OUTDOOR COOPERATIVE
LOCALIZATION FOR PEDESTRIANS
In the experiments, we develop a cooperative system comprising of
four pedestrians using an integration of sensors such as UWB, GNSS,
Raspberry Pi, Wi-Fi and camera, with the objective of achieving precise
positioning in indoor environments, as well as providing a seamless
position transition between indoor and outdoor environments. An overview
of the sensors used in the proposed system is shown in Figure 1. These
sensors are installed on a helmet that could be worn by a pedestrian.
One of the helmets (with installed sensors) is shown in Figure 2. Three
of the four such helmets developed in this research are shown in
Figure 3.
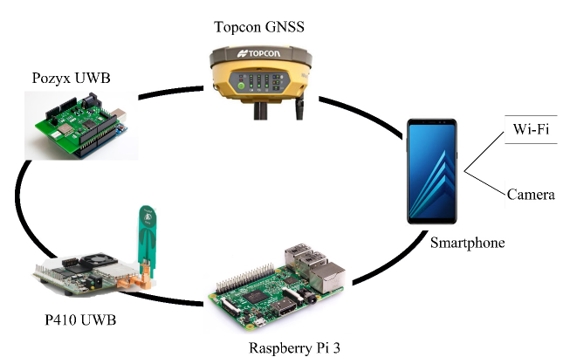
Figure 1: Overview of the sensors integrated on one of the pedestrian
helmets in the developed system.
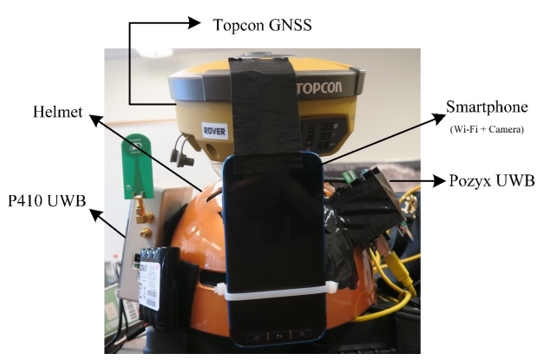
Figure 2:
Sensors installed on a helmet.

Figure 3: Three of the four helmets developed in this research.
In outdoor environments, the positioning solution is derived
primarily from GNSS and relative range observations among pedestrians.
In indoor and transition environments, the localization solution is
estimated using relative range observations among pedestrians, camera
observations, and Wi-Fi RSS (Received Signal Strength) measurements. In
these experiments, four pedestrians start from outdoor environments
where GNSS observations are available to all pedestrians. In addition, each pedestrian is observing relative range
measurements to other pedestrians. All the pedestrians then transition
from outdoor to indoor environments and thus, each pedestrian starts to
lose GNSS signals successively. Once all pedestrians are indoors, GNSS
observations are not available to any of the pedestrians. In such
conditions, pedestrians rely on relative UWB ranges (including ranges
between pedestrians, and ranges between pedestrian and anchors, i.e., a
set of static devices, fixed on constant positions), Wi-Fi measurements,
and camera observations, for localizing all users cooperatively. A total
of 18 UWB range observations either between pedestrians or between
pedestrian and static anchors are available for localization in indoor
and transition environments. A plot of range measurements as observed by
a pedestrian with respect to four UWBs as a function of time is shown in
Figure 4. It is seen that a maximum range of at least 60 m is achievable
in indoor environments. At certain instants, for example between 2500 to
2600 seconds x 100, significant outages in the UWB communication are
observed. This is most likely due to non-availability of direct line of
sight between the two UWBs. At time instants between 2700 and
3100 s x 100, recurring communication outages (for UWB 1) are observed.
Further, it is observed that UWB ranges are corrupted by outliers that
are likely because of multipath in indoor environments. Such outliers
should be accounted for, within the cooperative state estimation
framework.
3. COOPERATIVE OUTDOOR VEHICLE POSITIONING
As a part of this campaign, a set of outdoor data was collected. The aim
of the data collection was to provide data for further research on
navigation and integrity monitoring solutions for Intelligent Transport
Systems (ITS) in urban environments. The outdoor tests included multiple
platforms and an extended sensor configuration, as for quality and for
supporting image based navigation, multiple LiDARs and a range of still
and video cameras were used. The platforms included four vehicles, two
cyclists and pedestrians sharing the same road section, and performing
various motion patterns. These experiments were planned with challenges
of urban environments (e.g. GNSS unavailability, bad satellite geometry)
in mind, as well as the inadequacy of sensor fusion of Inertial
Measurement Unit (IMU) and GNSS for certain applications of ITS. An
ad-hoc CP network was set up to be independent of GNSS and to enable
collection of redundant measurements.
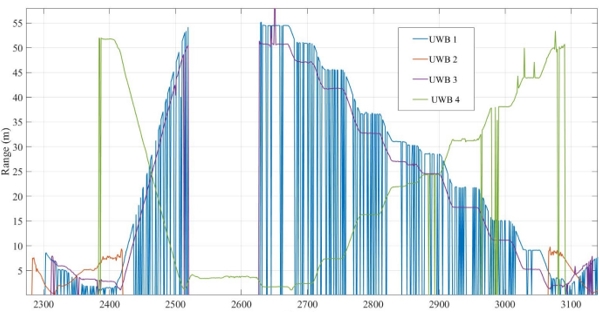
Figure 4: Plot of range observations from 4 UWBs with time.
A total of 16 points were set up as static infrastructure nodes.
Infrastructure nodes were equipped with Time Domain P440 and P410 UWB
radios for relative ranging. This allowed vehicles to communicate with
infrastructure and position themselves based on the known position of
infrastructure nodes and measured relative ranges between them. That
defines the Vehicle-to-Infrastructure (V2I) CP. To allow for
communication between the four cars, every car was equipped with P410
UWB radios. With every car sharing its position and relative range to
the other cars, Vehicle-to-Vehicle (V2V) CP was enabled. This set-up is
shown in Figure 5. Every car was equipped with survey-grade GNSS
receiver and one UWB radio for V2V CP. Given the limited number of
available sensors, only one vehicle was equipped with additional UWB
radio for V2I CP and IMUs (H764G1 and H764G2 Honeywell, 3DM-GX3-35
MicroStrain).
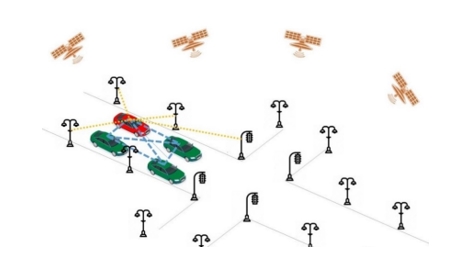
Figure 5: Experimental set-up of V2V and V2I CP.
The datasets were collected in an open sky environment, which enabled
simultaneous collection of ground truth. Further, this experiment
consists of two different tasks. The first part of the experiment aimed
to collect the data when the cars are driving in different formations
along the lane (Figure 6). The second part of the experiment was focused
on intersection level positioning were the cars were performing
different operations at intersections (Figure 7). These two sets of data
provide an opportunity of further research on optimal CP network
geometries given a specific ITS application requirements (integrity,
accuracy, continuity, availability).

Figure 6: Lane level experiment. On the left: map of the trajectory for
1 car. On the right: a photograph of the data collection process and the
experimental set-up on field.
 Figure 7: Intersection level experiment. On the left: map of the
trajectory for 1 car. On the right: a photograph of the data collection
process and the experimental set-up.
Figure 7: Intersection level experiment. On the left: map of the
trajectory for 1 car. On the right: a photograph of the data collection
process and the experimental set-up.
3.1 The Reference Vehicle (GPSVan)
A GMC Suburban customized measurement vehicle, called GPSVan
(Grejner-Brzezinska 1996), customized for autonomous vehicle research
(Toth et al., 2018; Koppanyi and Toth, 2018) was used for the data
acquisition, see Figure 8. The navigation sensors, GPS/GNSS receivers
and IMUs are located inside the van. A light frame structure installed
on the top and front of the vehicle provides a rigid platform for the
antennas and UWB units, and imaging sensors, such as LiDAR and different
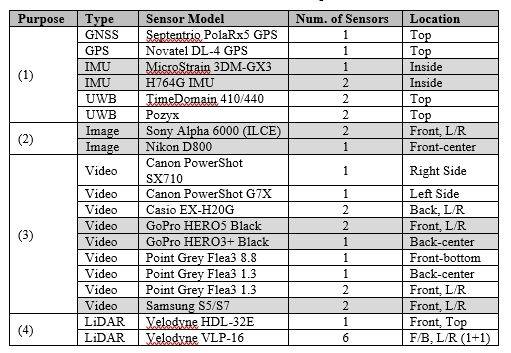
types of cameras. The sensor configuration used during the data
acquisition consists of two GPS/GNSS receivers, three IMUs, four UWB
transmitters, three high-resolution DSLR cameras for acquiring still
images, 13 P&S (Point and Shoot) cameras for capturing videos, and seven
mobile LiDAR sensors, see Table 1. The four primary purposes of the
various sensors are categorized as:
- Georeferencing and time
synchronization: GPS/GNSS, UWB and IMU sensors provide accurate time as
well as position and attitude data of the platform, allowing for sensor
time synchronization and sensor georeferencing (Kim et al., 2004).
- Optical image acquisition:
these sensors are carefully calibrated and synchronized in order to
provide accurate geometric data for mapping; for instance, by using
stereo, multiple-image photogrammetric and computer vision methods
(Geiger et al., 2011).
- Video logging: these
sensors provide a continuous coverage of the environment during the
tests. The quality of these sensors does not allow for accurate time
synchronization and calibration, applied to high quality still image
sensors. Nevertheless, the moderate geometric accuracy combined with the
high image acquisition rate allows for efficient object extraction and
tracking of traffic signs, road signs, and obstacles, etc.
(Maldonado-Bascon et al., 2007; Greenhalgh and Mirmehdi, 2012). In
addition, dynamic objects, such as vehicles, cyclists, pedestrians,
etc., can be tracked.
- 3D data acquisition:
Velodyne LiDAR sensors allow for direct 3D data acquisition that can be
used for object space reconstruction, and object tracking (Azim and
Aycard, 2012; Jozkow et al., 2016).
GPS/GNSS, UWB and IMU sensors provide accurate georeferencing of the
platform, and accurate time base for the time synchronization. Antennas
located on the top of the GPSVan deliver the GPS/GNSS signals to
multi-frequency receivers located inside the vehicle. The Septentrio
PolaRx5 receiver with PolaNt-x MC antenna (SEPT) is a state-of-the-art
multi-constellation system that supports data logging of multi-frequency
signals at high temporal resolution (Septentrio, 2018). The GPS, a
Novatel DL-4 with Novatel 600 antenna an older model is primarily used
for time synchronization and backup positioning sensor. The GNSS data is
post-processed with DGNSS (using phase measurements) technique. The
positioning accuracy of the post-processed GNSS data is at
centimeter-level for open-sky areas. However, at several areas at the
OSU campus, the positioning accuracy is lower due to the limited clear
line of sight to the satellites; urban-canyon effect. An UWB network was
installed in the test area, providing UWB positioning for the testing.
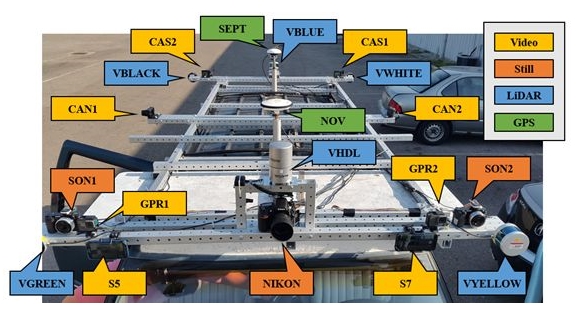
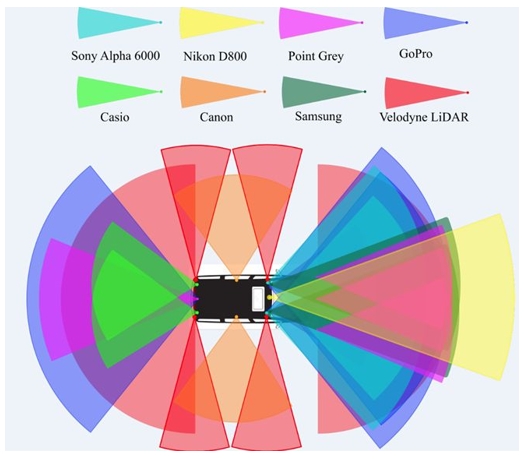
Figure 8: The top view of the GPSVan and field of views of the imaging
sensors.
Table 1. Overview of the sensors; see explanation in the text.
The IMU sensors provide attitude data for the georeferencing, and are
also used for obtaining navigation solution during GPS/GNSS-outages. Two
types of IMUs were used during the data acquisition. H764G is a high
accuracy navigation-grade IMU. Two of these sensors are located inside
the platform, however only the H764G-1 is used during the
post-processing, and fused with the SEPT GPS in a Kalman filter to
derive the navigation solution. The MicroStrain 3DM-GX3 sensor is a
lower-grade IMU which is used for sensor performance comparison.
The utilized cameras can be divided into two groups according to their
capabilities and operating modes. The first group includes the DSLR
cameras. These cameras captured still images with high resolution but
with low sampling frequency (0.5-1 Hz). Due to the low temporal
resolution, the main usage for these cameras is to provide
high-resolution images for deriving accurate geometric data; these
cameras are well-calibrated and precisely synchronized to the UTC
reference time system. In the other group, the cameras captured images
in video mode, and thus, the environment is recorded with high temporal
resolution, but at lower image-resolution. These cameras are not
rigorously calibrated and synchronized. These data streams can be used
for real-time scene understanding, image interpretation, obstacle
detection or tracking. The various types of sensors allow for
performance comparison of the imaging capabilities of the different
sensors.
3.2 Ultra-Wide Band Ranging
An UWB-based positioning system is usually formed by a set of static
devices, fixed on constant positions (anchors), and a set of moving ones
(rovers). When anchor positions are known a priori, the system typically
ensures positioning with errors at decimeter-level. Despite this level
of accuracy is sufficient for several applications, the potential of the
system shall be higher. Indeed, UWB range measurements are usually
characterized by a random error at centimeter-level and by a (typically
larger) systematic error, which depends on the environment (e.g.
multipath) and on the configuration of the UWB devices.
The experiment aims at investigating the possibility of calibrating the
UWB system in order to compensate for the effects of the static parts of
the environment on UWB measurements, hence obtaining an improvement of
the overall positioning accuracy. To this aim, 14 Pozyx and 14
TimeDomain UWB anchors were fixed on the walls along a corridor in one
single floor as well as in the staircase in the Bolz Hall building of
the Ohio State University, and calibration and validation range
measurement datasets were collected by a rover on 35 checkpoints along
the corridor, see Figure 9.

Figure 9: Positions of the checkpoints along the considered corridor.
Preliminary results were obtained by considering a very simple
calibration model, where for each checkpoint the range error measured
during calibration was considered as the bias to be removed during
validation on the same checkpoint. Figure 10 shows the UWB range error
distribution for the Pozyx rover on the validation dataset, and the
corresponding distribution after removing the bias estimated during the
calibration. The results show that the considered approach can
potentially be useful to reduce the effect of the systematic error on
the UWB measurements. However, this kind of approach can be used only to
reduce the effect of the static part of the environment, whereas the
effect of moving objects/persons is not removed. Since the simple
calibration model can be applied only on the same positions used for its
derivation, generalizations, based on bi-dimensional spline
interpolation and on machine learning, are under investigation.
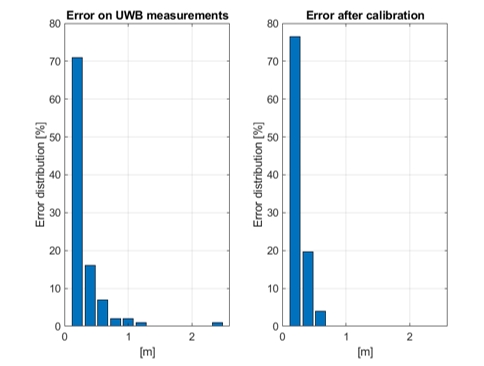
Figure 10: Distribution of the range error for the Pozyx rover in the
validation dataset (left), and distribution of the error taking into
account of the estimated environment effect (right).
3.3 Velodyne LiDAR Data Reduction
As seen above measurements with various sensors were performed, among
others Velodyne LiDAR. Velodyne HDL-32 LiDAR generates up to ~1.39
million points per second, Velodyne VLP-16 LiDAR generates up to ~600
thousands points per second. Thus, using these sensors a huge volume of
data is acquired in a very short time. In many cases, it is reasonable
to reduce the size of the dataset with eliminating points in such a way
that the datasets, after reduction, meet specific optimization criteria.
A lot of frames from Velodyne LiDAR were obtained during the experiments
with millions of points. After pre-processing and georeferencing we can
prepare the 3D point cloud. Standard georeferencing of MLS data was
based on the transformation from the scanner local coordinates to global
coordinates using boresight parameters and navigation information from
the on-board GPS and IMU. The reduction can take place either on the
stopped frame, obtained directly from the Velodyne LiDAR measurement, or
can be performed on the entire 3D point cloud. For reducing the numbers
of points we can use the OptD (Optimum Dataset) method.
The OptD method for processing data from Airborne Laser Scanning and
Terrestrial Laser Scanning was presented in Błaszczak-Bąk (2016) and
Błaszczak-Bąk et al. (2017). The OptD method can be performed in two
variants: (1) with one criterion optimization called the OptD-single,
and (2) with multi criteria optimization called the OptD-multi. The OptD
method uses linear object generalization methods, but the calculations
are performed in a vertical plane which allows for accurate control of
the elevation component. Błaszczak-Bąk et al. (2018) outlined the
modification of the OptD method, with one criterion for Mobile Laser
Scanning data captured by Velodyne sensors (called OptD-single-MLS). The
OptD-single-MLS method is implemented in nine consecutive steps
described in Błaszczak-Bąk et al. (2018).
From the tests, the option 1 (with one frame) is presented in Figure 11.
The original dataset for Frame 1 and the derived datasets after
OptD-single-MLS reduction are characterized in Table 2. The OptD method
allowed keeping Zmin and Zmax values, the average value of the height in
the set will change and the SD parameter means the range of the height
of the measurement points in relation to the mean. SD will increase as
the number of points in the point cloud decreases. The OptD-single-MLS
method removes those points which do not have relevant effect on the
terrain characteristics from a practical point of view. The
OptD-single-MLS method provides total control over the number of points
in the dataset.
- original frame
- 50% from original frame
- 40% from original frame
- 20% from original frame
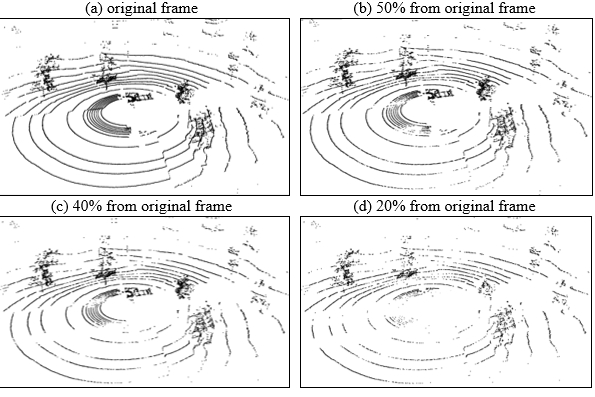
Figure 11: MLS data (a) original frame, (b) 50% of points after
reduction, (c) 40% of points after reduction, (d) 20% of points after
reduction.

Table 2. Characteristics of obtained datasets after the OptD-single-MLS
method for one frame
4. WI-FI INDOOR POSITIONING USING LOCATION
FINGERPRINTING
The vast majority of current indoor localization systems are designed
for sub-meter accuracy in position estimation, which is unnecessary for
most indoor navigation applications (see e.g. Pritt, 2013). Room-level
or region-level granularity of location is sufficient for most location
aware services (Castro et al., 2001; Chen et al., 2012; Jiang et al.,
2012; Jiang et al., 2013). RSS-based Wi-Fi fingerprinting is a typical
method frequently used for location estimation, since it does not need
any prior knowledge of Access Points (APs) deployment. The idea of the
fingerprint technology is to use online RSS measurements to match the
fingerprint database previously generated at every location in the
offline training phase. In the probabilistic fingerprint approach, a
model for the statistical distribution of the RSS for each different
location is built, based on the sample data collected during the
training phase. In the online phase, Bayesian inference is used to
calculate the probability that a user is at a certain location given a
specified observation, and estimate the most likely location of the
mobile device. The accuracy of the statistical distribution model
directly affects the final performance of the probabilistic fingerprint
positioning (Xia et al., 2017). Li et al. (2018) proposed a statistical
approach to localize the mobile user to room level accuracy based on the
Multivariate Gaussian Mixture Model (MVGMM). The proposed system is
designed to handle practical problems such as device heterogeneity,
signal reliability and environment complexity, thereby the users have no
basic knowledge about the base stations deployed within the environment
in advance. A Hidden Markov Model (HMM) is applied to track the mobile
user, where the hidden states comprise the possible room locations and
the RSS measurements are taken as observations.
The aim of the test is to build up the training database for a
probabilistic indoor localization system which can localize mobile user
with room level accuracy based on an University wireless network. The
test scenario consisted of three stages which are (1) calibration of the
smartphones, (2) training data measurements and (3) test data
collection. The calibration has to be performed to mitigate the RSS
variance problems due to the device heterogeneity. For that purpose,
static (stop-and-go mode of the smartphone CPS App[1])
observations are carried out where all devices collect 200 scans at
different locations simultaneously. This is followed by the training
data collection to be able to construct the fingerprint database for
each room in the indoor environment. Here the collection mode is static
while each user chooses different reference points in the rooms. Their
locations must to be randomly chosen and need not to be known, but they
need to be manually labeled with the room ID. In the final stage, the
test data is collected to track the user's trajectory to verify the
proposed system. In this case the collection mode is kinematic (dynamic
walking mode of the CPS App). In total, 11 kinematic walking
trajectories are carried out with the different smartphones.
Figure 12 shows two examples of obtained trajectories of one smartphone
user. As shown in Li et al. (2018) the walking trajectories along the
reference points could be obtained with matching success rates of up to
97%. The MVGMM is efficient at approximating the RSS distribution for
each room that takes the signal correlations into computation. The
system obtained a reliable 93.0 % matching accu
racy for half of the trials. The performance was further improved to
97.3 % by introducing the conditional likelihood observation function,
which takes advantages of the unseen signatures of APs. Thus, the
proposed system demonstrated a practical prototype model of a reliable
room location awareness system in a real public environment. It can
handle the data uploaded by diverse devices and the noisy environment
(Li et al., 2018).
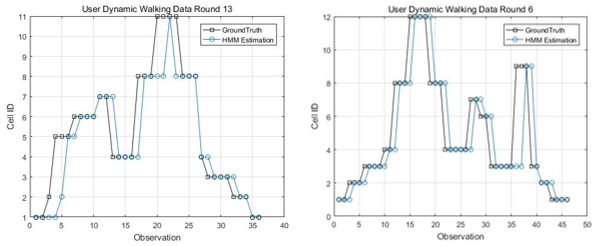
Figure 12: Examples of two kinematic walking trajectories.
5. CONCLUSIONS AND OUTLOOK
In the one-week benchmarking measurement campaign presented in this
paper, the main focus was led on CP of different platforms, i.e.,
vehicles, bicyclists and pedestrians, in GNSS-denied/challenged
in-/outdoor and transitional environments. An overview of the field
experimental schemes, set-ups, characteristics and sensor specifications
along with preliminary results including measurement data reduction, UWB
sensor calibration and Wi-Fi indoor positioning with room-level
granularity as well as user trajectory determination is given. It could
be proven that the test set-ups and employed sensors for the CP
localization of all involved sensor platforms – either if they are
vehicles or pedestrians – in the different test scenarios are suitable
and practicable. In the indoor environment, for instance, trajectories
of pedestrians walking around could be obtained with around 97% matching
success rate on average using Wi-Fi fingerprinting. In the case of UWB,
positioning is possible even better than on the decimeter-level. Further
data processing and analyses is currently in progress and the results
indicate significant performance improvements of users navigating within
a neighborhood. The extensive dataset is available from the joint
FIG/IAG Working Group.
REFERENCES
- Alam, N.; Dempster, A. G. (2013): Cooperative Positioning for Vehicular
Networks: Facts and Future.
IEEE Transactions on Intelligent Transportation Systems, 14(4), DOI:
10.1109/TITS.2013.2266339, pp. 1708-1717.
- Azim, A.; Aycard, O. (2012): Detection, Classification and Tracking of
Moving Objects in a 3D Environment. In Proceedings of the 2012 IEEE
Intelligent Vehicles Symposium, Alcala de Henares, pp. 802-807.
- Błaszczak-Bąk, W. (2016): New Optimum Dataset Method in LiDAR
Processing. Acta Geodyn. Geomater. 13, DOI:10.13168/AGG.2016.0020, pp.
379-386.
- Błaszczak-Bąk, W.; Koppanyi, Z.; Toth C. K. (2018): Reduction Method for
Mobile Laser Scanning Data. ISPRS International Journal of Geo-Information, 7(7), 285, DOI:
10.3399/ijgi7070285.
- Błaszczak-Bąk, W.; Sobieraj-Żłobińska A.; Kowalik, M. (2017): The
OptD-multi Method in LiDAR Processing. Meas. Sci. Technol. 28,
DOI:10.1088/1361-6501/aa7444075009.
- Castro, P.; Chiu, P.; Kremenek, T.; Muntz, R. (2001): A Probabilistic
Room Location Service for Wireless Networked Environments. In
Proceedings of the International Conference on Ubiquitous Computing,
Göteborg, Sweden, September29 - October1, pp. 18-34.
- Chen, Y.; Lymberopoulos, D.; Liu, J.; Priyantha, B. (2012): FM-based
Indoor Localization. In Proceedings of the 10th International Conference
on Mobile Systems, Applications, and Services, Lake District, UK, June
25-29, pp. 169-182.
- Geiger, A.; Ziegler, J; Stiller, C. (2011): StereoScan: Dense 3D
Reconstruction in Real-time. In Proceedings of the 2011 IEEE Intelligent
Vehicles Symposium (IV), Baden-Baden, pp. 963-968.
- Greenhalgh, J.; Mirmehdi, M. (2012): Real-Time Detection and Recognition
of Road Traffic Signs. IEEE Transactions on Intelligent Transportation
Systems, 13(4), pp. 1498-1506.
- Grejner-Brzezinska, D. A. (1996): Positioning Accuracy of the GPSVan. In
Proceedings of the 52nd Annual Meeting of The Institute of Navigation.
Cambridge, MA, USA.
- Hofer, H.; Retscher, G. (2017): Combined Wi-Fi and Inertial Navigation
with Smart Phones in Out- and Indoor Environments, In Proceedings of the
VTC2017-Spring Conference, June 4-7, Sydney, Australia, 5 pgs.
- Jiang, Y.; Xiang, Y.; Pan, X.; Li, K.; Lv, Q.; Dick, R.P.; Shang, L.;
Hannigan, M. (2013): Hallway Based Automatic Indoor Floorplan
Construction Using Room Fingerprints. In Proceedings of the 2013 ACM
International Joint Conference on Pervasive and Ubiquitous Computing,
Zurich, Switzerland, September 8-12, pp. 315-324.
- Jiang, Y.; Pan, X.; Li, K.; Lv, Q.; Dick, R.P.; Hannigan, M.; Shang, L.;
Ariel (2012): Automatic Wi-Fi Based Room Fingerprinting for Indoor
Localization. In Proceedings of the 2012 ACM Conference on Ubiquitous
Computing, Pittsburgh, PA, USA, September 5-8, pp. 441-450.
- Jozkow, G.; Toth, C. K.; Grejner-Brzezinska, D. A. (2016): UAS
Topographic Mapping with Velodyne LiDAR Sensor. In ISPRS Annals of the
Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume
III-1, 2016 XXIII ISPRS Congress, July 12-19, Prague, Czech Republic.
- Kealy, A.; Toth, C. K.; Grejner-Brzezinska, D.; Roberts, G.; Retscher,
G.; Gikas, V. (2011): A New Paradigm for Developing and Delivering
Ubiquitous Positioning Capabilities. In Proceedings of the FIG Working
Week 2011 ‘Bridging the Gap between Cultures’, May 18-22, 2011,
Marrakech, Morocco, 15 pgs.
- Kealy, A.; Retscher, G.; Toth, C. K.; Hasnur-Rabiain, A.; Gikas, V.;
Grejner-Brzezinska, D. A.; Danezis, C.; Moore, T. (2015): Collaborative
Navigation as a Solution for PNT Applications in GNSS Challenged
Environments – Report on Field Trials of a Joint FIG/IAG Working Group.
Journal of Applied Geodesy, 9(4), DOI 10.1515/jag-2015-0014, pp.
244-263.
- Kim, S.-B.; Lee, S.-Y.; Hwang, T.-H.; Choi, K.-H. (2004): An Advanced
Approach for Navigation and Image Sensor Integration for Land Vehicle
Navigation. In Proceedings of the IEEE 60th Vehicular Technology
Conference, 2004. VTC2004-Fall. 2004, Los Angeles, CA, Vol. 6, pp.
4075-4078.
- Koppanyi, Z.; Toth, C. K. (2018): Experiences with Acquiring Highly
Redundant Spatial Data to Support Driverless Vehicle Technologies, In
ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial
Information Sciences, Vol. IV-2, pp. 161-168.
- Li, Y; Williams, S.; Moran, B.; Kealy, A.; Retscher, G. (2018):
High-dimensional Probabilistic Fingerprinting in Wireless Sensor
Networks based on a Multivariate Gaussian Mixture Model. Sensors, 18(8),
2602, DOI:10.3390/S18082602, 24 pgs.
- Maldonado-Bascon, S.; Lafuente-Arroyo, S.; Gil-Jimenez, P.;
Gomez-Moreno, H.; Lopez-Ferreras, F. (2007): Road-Sign Detection and
Recognition Based on Support Vector Machines. IEEE Transactions on
Intelligent Transportation Systems, 8(2), pp. 264-278.
- Pritt, N. (2013): Indoor Location with Wi-Fi Fingerprinting. In
Proceedings of the Applied Imagery Pattern Recognition Workshop (AIPR):
Sensing for Control and Augmentation, Washington, DC, USA, October
23-25, pp. 1-8.
- Retscher, G.; Kealy, A. (2006): Ubiquitous Positioning Technologies for
Modern Intelligent Navigation Systems. The Journal of Navigation, 59(1),
pp. 91-103.
- Septentrio (2018) PolaRx5.
https://www.septentrio.com/products/gnss-receivers/reference-receivers/polarx-5
(accessed September 2018).
- Toth, C. K.; Koppanyi, Z.; Lenzano, M. G. (2018): New Source of
Geospatial Data: Crowdsensing by Assisted and Autonomous Vehicle
Technologies, In The International Archives of the Photogrammetry,
Remote Sensing and Spatial Information Sciences, Vol. XLII-4/W8, 2018
FOSS4G 2018 Academic Track, August 29-31, Dar es Salaam, Tanzania.
- Xia, S.; Liu, Y.; Yuan, G.; Zhu, M.; Wang, Z. (2017): Indoor Fingerprint
Positioning Based on Wi-Fi: An Overview. ISPRS International Journal of
Geo-Information, 135(6), DOI:10.3390/ijgi6050135,
25 pgs.
BIOGRAPHICAL NOTES
Allison Kealy is a Professor in the School of
Science, Geospatial Science at RMIT University, Australia. She holds a
degree in Land Surveying from The University of the West Indies,
Trinidad, and a PhD in GPS and Geodesy from the University of Newcastle
upon Tyne, UK. Allison’s research interests include sensor fusion,
Kalman filtering, high precision satellite positioning, GNSS QC,
wireless sensor networks and LBS. She is the co-chair of the joint FIG
WG5.5/IAG WG4.1.1 on Multi-sensor Systems, vice president of the IAG,
Com. 4 on Positioning and Applications and technical representative to
the US Institute of Navigation.
Guenther Retscher is an Associate Professor at the Department of Geodesy
and Geoinformation of the TU Wien – Vienna University of Technology,
Austria. He received his Venia Docendi in the field of Applied Geodesy
from the same university in 2009 and his Ph.D. in 1995. His main
research and teaching interests are in the fields of engineering
geodesy, satellite positioning and navigation, indoor and pedestrian
positioning as well as application of multi-sensor systems in geodesy
and navigation. Guenther is currently the co-chair of the joint FIG WG
5.5 and IAG WG 4.1.1 on Multi-sensor Systems.
Jelena Gabela is currently working towards the PhD degree at The
University of Melbourne, Australia. Her research interests include
sensor fusion, integrity monitoring of multi-GNSS and cooperative
positioning. She received her BE and MS degrees in geodesy and
geoinformatics, from the University of Split, Croatia in 2014, and the
University of Zagreb, Croatia in 2016.
Yan Li is currently working towards the PhD degree in the department of
electrical and electronic engineering, The University of Melbourne,
Australia. She received her BE degree in the school of astronautics from
Northwestern Polytechnical University, China in 2011, the MS in the
center of autonomous systems in University of Technology, Sydney in
2014. Her research interests include wireless sensor networks and
inertial navigation.
Salil Goel earned his Ph.D. jointly from the University of Melbourne,
Australia and IIT Kanpur, India as a Melbourne India Postgraduate
Academy (MIPA) scholar in 2017. After working as a Research Fellow at
RMIT University, Australia, Salil joined IIT Kanpur, India as Assistant
Professor in June 2018. His research interests are sensor fusion for
mapping and navigation, LiDAR, Filtering and estimation and Unmanned
Aerial Vehicles.
Charles Toth is a Research Professor in the Department of Civil,
Environmental and Geodetic Engineering, The Ohio State University, USA.
He received a MSc in Electrical Engineering and a PhD in Electrical
Engineering and Geo-Information Sciences from the Technical University
of Budapest, Hungary. His research expertise include spatial information
systems, LiDAR, high-resolution imaging, surface extraction, data
acquisition, modeling, integrating and calibrating of multi-sensor
systems, 2D/3D signal processing, and mobile mapping technologies. He
has published over 400 peer-reviewed journal and proceedings papers, and
is the co-editor of the widely popular book on LiDAR: Topographic Laser
Ranging and Scanning: Principles and Processing. He is ISPRS 2nd
President (2016-2020) and ASPRS Past President.
Andrea Masiero has a Post-doc position at the Interdepartmental Research
Center of Geomatics of the University of Padua, Italy. His research
interests range from geomatics to computer vision, smart camera
networks, modeling & control of adaptive optics systems. He is currently
working on low cost positioning and mobile mapping systems.
Wioleta Błaszczak-Bąk is an Assistant Professor at the Institute of
Geodesy of the University of Warmia and Mazury in Olsztyn, Poland. She
received her PhD in 2006. She is conducting research on LiDAR point
cloud processing. She is an author of papers on big data optimization.
Vassilis Gikas received the Dipl. lng. in Surveying Engineering from the
National Technical University of Athens, Greece and the PhD degree in
Geodesy from the University of Newcastle upon Tyne, UK. Currently he is
a Professor with the School of Rural and Surveying Engineering, NTUA.
His areas of research are in sensor fusion and Kalman filtering for
navigation, engineering surveying and structural deformation monitoring
and. He is the chair of IAG Sub-Com. 4.1.
Harris Perakis is a PhD candidate at School of Rural and Surveying
Engineering of the National Technical University of Athens. He holds a
Dipl. lng. in Surveying Engineering from the same School (2013). His
scientific interests include positioning within indoor and hybrid
environments, trajectory assessment and geodetic sensor data fusion.
Zoltan Koppanyi is post-doctoral researcher at The Ohio State
University, USA. He received degrees in computer science, civil
engineering, and a MSc in Land Surveying and GIS Engineering. He
received his PhD in Earth Sciences at the Budapest University of
Technology and Economics. His research interests cover several fields of
navigation and mapping, such as navigation in GNSS-denied or corrupted
environments, LiDAR & image-based tracking, UWB positioning, sensor
fusion, bundle adjustment and dense reconstruction from images.
Dorota Grejner-Rzezinska is a Professor and Associate Dean for Research
at the College of Engineering, The Ohio State University (OSU).
She served as s Chair of the Dept. of Civil, Environmental and Geodetic
Engineering, and Director of the SPIN Laboratory, OSU. Her research
interests cover GPS/GNSS algorithms, GPS/inertial and other sensor
integration for navigation in GNSS-challenged environments, sensors and
algorithms for indoor and personal navigation. She published over 300
peer reviewed journal and proceedings papers and led over 55 sponsored
research projects.
CONTACTS
Dr. Guenther Retscher
Department of Geodesy and Geoinformation
TU Vienna – Vienna University of Technology
Gusshausstrasse 27-29 E120/5
1040 Vienna, AUSTRIA
Tel. +43 1 58801 12847
Fax +43 1 58801 12894
Email: guenther.retscher@tuwien.ac.at
Web site:
http://www.geo.tuwien.ac.at/
[1] Combined Positioning System App developed by
Hannes Hofer at TU Wien (see e.g. Hofer and Retscher,
2017).






















